DuMux applications
Example application
Simulation goal
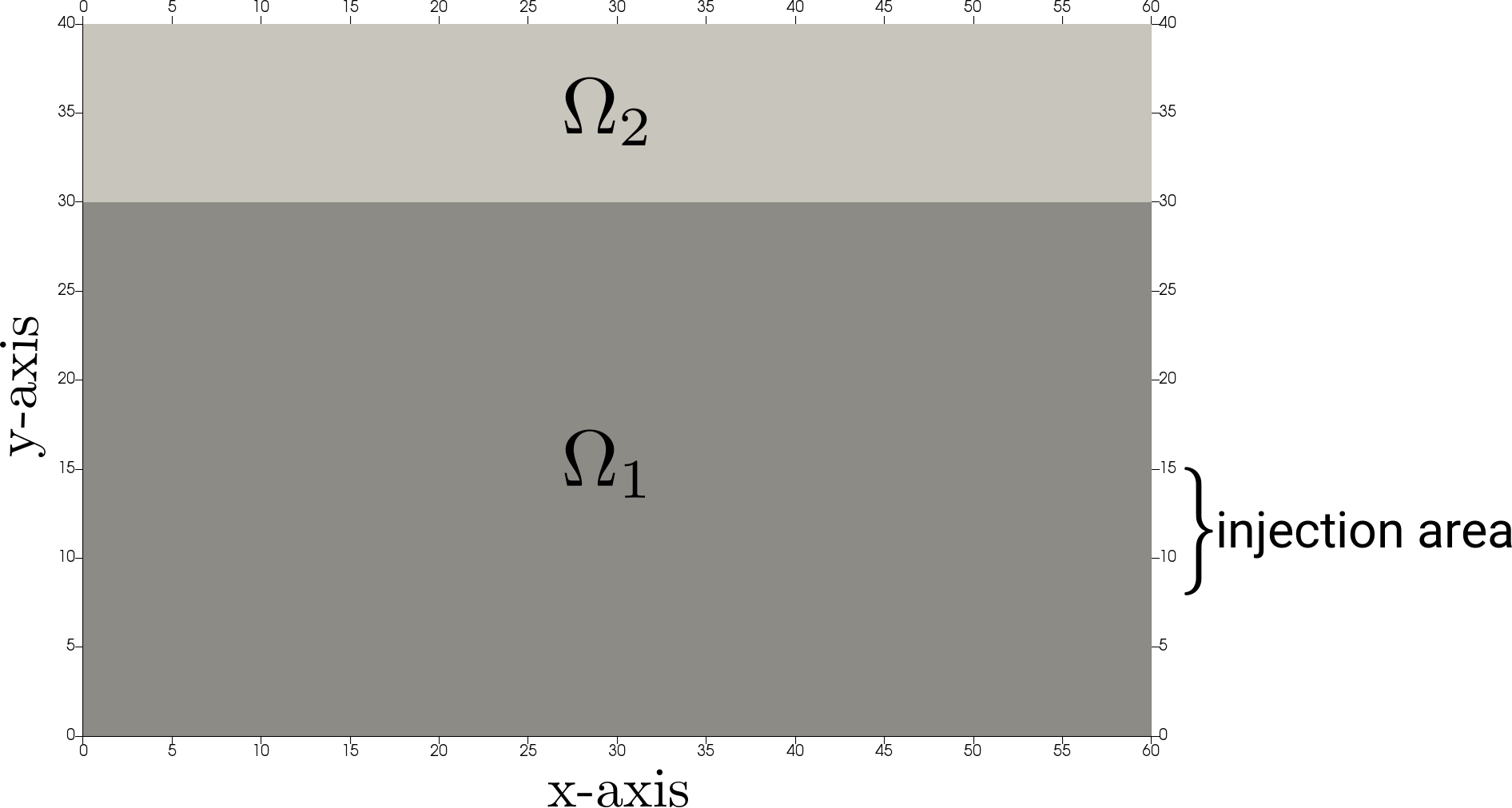
Gas injection / immiscible two phase flow
Mass balance equations for two fluid phases: \[ \begin{aligned} \frac{\partial \left(\phi \varrho_\alpha S_\alpha \right)}{\partial t} + \nabla \cdot \left(\varrho_\alpha \boldsymbol{v}_\alpha \right) - q_\alpha = 0, \quad \alpha \in \lbrace w, n \rbrace. \end{aligned} \]
Momentum balance equations (multiphase-phase Darcy’s law): \[ \begin{aligned} \boldsymbol{v}_\alpha = -\frac{k_{r\alpha}}{\mu_\alpha} \mathbf{K} \left(\nabla\, p_\alpha - \varrho_{\alpha} \mathbf{g} \right), \quad \alpha \in \lbrace w, n \rbrace. \end{aligned} \]
Gas injection / immiscible two phase flow
\[ \begin{aligned} \frac{\partial \left(\phi \varrho_\alpha S_\alpha \right)}{\partial t} - \nabla \cdot \left( \varrho_\alpha \frac{k_{r\alpha}}{\mu_\alpha} \mathbf{K} \left(\nabla\, p_\alpha - \varrho_{\alpha} \mathbf{g} \right) \right) - q_\alpha = 0 \end{aligned} \]
- \(p_w\), \(p_n\): wetting and non-wetting fluid phase pressure
- \(\varrho_\alpha\), \(\mu_\alpha\): fluid phase density and dynamic viscosity
- \(\phi\), \(\mathbf{K}\), \(k_{r\alpha}\): porosity, intrinsic permeability, relative permeability
- \(S_w\), \(S_n\): wetting and non-wetting saturation
- \(\mathbf{g}\), \(q_\alpha\): gravitational potential, source term
Gas injection / immiscible two phase flow
\[ \begin{aligned} \frac{\partial \left(\phi \varrho_\alpha S_\alpha \right)}{\partial t} - \nabla \cdot \left( \varrho_\alpha \frac{k_{r\alpha}}{\mu_\alpha} \mathbf{K} \left(\nabla\, p_\alpha - \varrho_{\alpha} \mathbf{g} \right) \right) - q_\alpha = 0 \end{aligned} \]
- Constitutive relations: \(p_n := p_w + p_c\), \(p_c := p_c(S_w)\), \(k_{r\alpha}\) = \(k_{r\alpha}(S_w)\)
- Physical constraint: \(S_w + S_n = 1\)
- Primary variables: \(p_w\), \(S_n\) (wetting phase pressure, non-wetting phase saturation)
A DuMux application
A DuMux application
The source code for a typical DuMux application consists of:
- Property specializations (e.g.
properties.hh) - Problem class definition (e.g.
problem.hh) and often a spatial parameter class definition (e.g.spatialparams.hh) - A parameter configuration file (e.g.
params.input) - The main program (e.g.
main.cc) CMakeLists.txt(CMake build system configuration)
Property specializations
Properties
“Compile-time configuration”
“Tell DuMux what type of classes to use”
Details on properties in Part II: Property system
*properties*.hh
Create tag, choose model and discretization scheme:
namespace Dumux::Properties::TTag {
// the application type tag (choose any name)
struct Injection2pCC { using InheritsFrom = std::tuple<TwoP, CCTpfaModel>; };
} // end namespace Dumux::Properties::TTagFile:
dumux-course/exercises/exercise-basic/properties2p.hh
Specialize the Grid property for tag
TTag::Injection2pCC to set the grid type:
namespace Dumux::Properties {
template<class TypeTag>
struct Grid<TypeTag, TTag::Injection2pCC>
{ using type = Dune::YaspGrid<2>; }; // Yet Another Structured Parallel Grid
} // end namespace Dumux::PropertiesFile:
dumux-course/exercises/exercise-basic/properties2p.hh
Specialize the Problem property to set the problem
type:
namespace Dumux::Properties {
template<class TypeTag>
struct Problem<TypeTag, TTag::Injection2pCC>
{ using type = InjectionProblem2P<TypeTag>; };
} // end namespace Dumux::PropertiesFile:
dumux-course/exercises/exercise-basic/properties2p.hh
The problem class InjectionProblem2P is discussed in one
of the following sections.
Specialize the SpatialParams property to set the spatial
parameter type:
namespace Dumux::Properties {
template<class TypeTag>
struct SpatialParams<TypeTag, TTag::Injection2pCC>
{
using GridGeometry
= GetPropType<TypeTag, Properties::GridGeometry>;
using Scalar
= GetPropType<TypeTag, Properties::Scalar>;
using type = InjectionSpatialParams<GridGeometry, Scalar>;
};
} // end namespace Dumux::PropertiesFile:
dumux-course/exercises/exercise-basic/properties2p.hh
Specialize the FluidSystem property to set the fluid
system type:
namespace Dumux::Properties {
template<class TypeTag>
struct FluidSystem<TypeTag, TTag::Injection2pCC>
{
using Scalar = GetPropType<TypeTag, Properties::Scalar>;
using Policy = FluidSystems::H2ON2DefaultPolicy<
/*fastButSimplifiedRelations=*/true>;
using type = FluidSystems::H2ON2<Scalar, Policy>;
};
} // end namespace Dumux::PropertiesFile:
dumux-course/exercises/exercise-basic/properties2p.hh
Problem definition
Problem
A “problem” class in DuMux implements a specific scenario:
*problem*.hh
template<class TypeTag>
class InjectionProblem2P : public PorousMediumFlowProblem<TypeTag>
{
// - boundary conditions
// - initial conditions
// - source terms
// - scenario name (for output)
}File:
dumux-course/exercises/exercise-basic/injection2pproblem.hh
Inherit from base class PorousMediumFlowProblem, only
override scenario-specific functions (static polymorphism).
The boundary condition types:
BoundaryTypes boundaryTypesAtPos(const GlobalPosition &globalPos) const
{
BoundaryTypes bcTypes;
// Use Dirichlet boundary conditions on the left
if (globalPos[0] < eps_)
bcTypes.setAllDirichlet();
// Use Neumann boundary conditions on the rest of the boundary
else
bcTypes.setAllNeumann();
return bcTypes;
}File:
dumux-course/exercises/exercise-basic/injection2pproblem.hh
Dirichlet boundary condition values (only called on Dirichlet boundaries)
PrimaryVariables dirichletAtPos(const GlobalPosition& globalPos) const
{ return initialAtPos(globalPos); }File:
dumux-course/exercises/exercise-basic/injection2pproblem.hh
PrimaryVariables is an array of primary variables (here,
the size of the array is 2).
More general Dirichlet boundary functions:
File:
dumux/dumux/common/fvproblem.hh
File:
dumux/dumux/common/fvproblem.hh
Neumann boundary condition values / boundary fluxes (only called on Neumann boundaries)
NumEqVector neumannAtPos(const GlobalPosition& globalPos) const
{
NumEqVector values(0.0);
if (injectionActive() && onInjectionBoundary(globalPos))
{
values[Indices::conti0EqIdx + FluidSystem::N2Idx] = -1e-4;
values[Indices::conti0EqIdx + FluidSystem::H2OIdx] = 0.0;
}
return values;
}File:
dumux-course/exercises/exercise-basic/injection2pproblem.hh
NumEqVector is an array of equations (here, the size of
the array is 2).
More general Neumann boundary function:
template<class ElementVolumeVariables, class ElementFluxVariablesCache>
NumEqVector neumann(const Element& element,
const FVElementGeometry& fvGeometry,
const ElementVolumeVariables& elemVolVars,
const ElementFluxVariablesCache& elemFluxVarsCache,
const SubControlVolumeFace& scvf) const
{
...
}File:
dumux/dumux/common/fvproblem.hh
Initial conditions:
PrimaryVariables initialAtPos(const GlobalPosition& globalPos) const
{
PrimaryVariables values(0.0);
const Scalar densityW
= FluidSystem::H2O::liquidDensity(temperature(), 1.0e5);
const Scalar pw
= 1.0e5 - densityW*this->gravity()[dimWorld-1]
*(aquiferDepth_ - globalPos[dimWorld-1]);
values[Indices::pressureIdx] = pw;
values[Indices::saturationIdx] = 0.0;
return values;
}File:
dumux-course/exercises/exercise-basic/injection2pproblem.hh
Source/sink terms:
File:
dumux-course/exercises/exercise-basic/injection2pproblem.hh
More general source/sink function:
template<class ElementVolumeVariables>
NumEqVector source(const Element &element,
const FVElementGeometry& fvGeometry,
const ElementVolumeVariables& elemVolVars,
const SubControlVolume &scv) const
{
...
}File:
dumux/dumux/common/fvproblem.hh
Spatial Parameters definition
Spatial parameters
*spatialparams*.hh
template<class FVGridGeometry, class Scalar>
class InjectionSpatialParams
: public FVPorousMediumFlowSpatialParamsMP<
FVGridGeometry, Scalar,
InjectionSpatialParams<FVGridGeometry, Scalar>
> {
// parameters that are typically position-dependent
// e.g. porosity, permeability
};File:
dumux-course/exercises/exercise-basic/injection2pspatialparams.hh
Inherit from FVPorousMediumFlowSpatialParamsMP where
FV: finite volumes, MP: multi-phase flow.
A function returning the intrinsic permeability \(K\):
auto permeabilityAtPos(const GlobalPosition& globalPos) const
{
if (isInAquitard_(globalPos))
return aquitardK_;
return aquiferK_;
}File:
dumux-course/exercises/exercise-basic/injection2pspatialparams.hh
A function returning the porosity:
Scalar porosityAtPos(const GlobalPosition& globalPos) const
{
// here, either aquitard or aquifer porosity are returned
if (isInAquitard_(globalPos))
return aquitardPorosity_;
return aquiferPorosity_;
}File:
dumux-course/exercises/exercise-basic/injection2pspatialparams.hh
A function returning a parameterized constitutive law describing fluid-matrix interactions (\(p_c(S_w)\), \(k_r(S_w)\)):
auto fluidMatrixInteractionAtPos(const GlobalPosition& globalPos) const
{
if (isInAquitard_(globalPos))
return makeFluidMatrixInteraction(aquitardPcKrSwCurve_);
return makeFluidMatrixInteraction(aquiferPcKrSwCurve_);
}File:
dumux-course/exercises/exercise-basic/injection2pspatialparams.hh
Set the (constant) temperature field in the domain:
File:
dumux-course/exercises/exercise-basic/injection2pspatialparams.hh
Runtime parameters
Runtime parameters
Dune INI syntax ([Group] and Key = Value
pairs)
params.input
File:
dumux/test/porousmediumflow/2p/nonisothermal/params.input
See Part I: Runtime parameters for details.
Main program
- Each problem has one main file (
test_name.ccormain.cc) - Here:
2pmain.ccand2pnimain.cc - Contains the
mainfunction (mandatory in C/C++ programs)
Main function
Calling Dumux::initialize is mandatory at the beginning
of each DuMux program to make sure the environment is
correctly set up.
int main(int argc, char** argv)
{
// initialize MPI+X backends (mandatory)
Dumux::initialize(argc, argv);File:
dumux-course/exercises/exercise-basic/2pmain.cc
Parse runtime parameters:
File:
dumux-course/exercises/exercise-basic/2pmain.cc
See Part I: Runtime parameters for details.
Define an alias for the test problem type tag
File:
dumux-course/exercises/exercise-basic/2pmain.cc
The tag (tag alias) is used to extract types and values via the property system (details on properties in Part II: Property system).
Create the computational grid:
// create a grid (take parameters from input file)
GridManager<GetPropType<TypeTag, Properties::Grid>> gridManager;
gridManager.init();
// obtain the grid and a grid view
const auto& grid = gridManager.grid();
const auto& leafGridView = grid.leafGridView();File:
dumux-course/exercises/exercise-basic/2pmain.cc
More details on the grid in Part I: Grid.
GridGeometry and Problem instantiation:
// create the finite volume grid geometry
// (represents the chosen discretization scheme)
using GridGeometry = GetPropType<TypeTag, Properties::GridGeometry>;
auto gridGeometry = std::make_shared<GridGeometry>(leafGridView);
// the problem (initial and boundary conditions)
using Problem = GetPropType<TypeTag, Properties::Problem>;
auto problem = std::make_shared<Problem>(gridGeometry);File:
dumux-course/exercises/exercise-basic/2pmain.cc
Initial solution and secondary variables:
// the solution vector
using SolutionVector
= GetPropType<TypeTag, Properties::SolutionVector>;
SolutionVector x(gridGeometry->numDofs());
// the grid variables
using GridVariables = GetPropType<TypeTag, Properties::GridVariables>;
auto gridVariables
= std::make_shared<GridVariables>(problem, gridGeometry);
gridVariables->init(x);File:
dumux-course/exercises/exercise-basic/2pmain.cc
Setting up VTK output:
// initialize the vtk output module
VtkOutputModule<GridVariables, SolutionVector>
vtkWriter(*gridVariables, x, problem->name());
// optionally add a velocity post-processor
using VelocityOutput
= GetPropType<TypeTag, Properties::VelocityOutput>;
vtkWriter.addVelocityOutput(
std::make_shared<VelocityOutput>(*gridVariables));
// add input/output defaults for the chosen model
using IOFields = GetPropType<TypeTag, Properties::IOFields>;
IOFields::initOutputModule(vtkWriter);File:
dumux-course/exercises/exercise-basic/2pmain.cc
Some typical main function structures:
- Steady-state linear problems
- Steady-state non-linear problems
- Time-dependent non-linear problems
Assembling the system for a steady-state linear problem:
// the assembler for stationary problems
using Assembler = FVAssembler<TypeTag, DiffMethod::numeric>;
auto assembler = std::make_shared<Assembler>(
problem, gridGeometry, gridVariables);
// the discretization matrices for stationary linear problems
using JacobianMatrix
= GetPropType<TypeTag, Properties::JacobianMatrix>;
auto A = std::make_shared<JacobianMatrix>();
auto r = std::make_shared<SolutionVector>();
assembler->setLinearSystem(A, r);
assembler->assembleJacobianAndResidual(x);File:
dumux-course/exercises/exercise-mainfile/exercise1pamain.cc
and solve it using an iterative method:
using LinearSolver = ILUBiCGSTABIstlSolver<
LinearSolverTraits<GridGeometry>,
LinearAlgebraTraitsFromAssembler<Assembler>>;
auto linearSolver = std::make_shared<LinearSolver>(
gridGeometry->gridView(), gridGeometry->dofMapper());
(*r) *= -1.0; // solve Ax = -r to save update and copy
linearSolver->solve(*A, x, *r);File:
dumux-course/exercises/exercise-mainfile/exercise1pamain.cc
Simplified code for steady-state linear problem using
Dumux::LinearPDESolver
auto assembler = ...; // construct as before
auto linearSolver = ...; // construct as before
using Solver = LinearPDESolver<Assembler, LinearSolver>;
Solver solver(assembler, linearSolver);
// assemble & solve
solver.solve(x);File:
dumux/test/porousmediumflow/1p/rootbenchmark/main.cc
For steady-state non-linear problems, use
Dumux::NewtonSolver:
auto assembler = ...; // construct as before
auto linearSolver = ...; // construct as before
using Solver = NewtonSolver<Assembler, LinearSolver>;
Solver solver(assembler, linearSolver);
// linearize & solve
solver.solve(x);File:
dumux-course/exercises/exercise-mainfile/exercise1pbmain.cc
For time-dependent problems, pass a TimeLoop instance
and a solution vector carrying the solution on the previous/initial time
level to the assembler:
SolutionVector xOld = x;
auto timeLoop = std::make_shared<TimeLoop<Scalar>(0.0, dt, tEnd);
timeLoop->setMaxTimeStepSize(maxDt);
using Assembler = FVAssembler<TypeTag, DiffMethod::numeric>;
auto assembler = std::make_shared<Assembler>(
problem, gridGeometry, gridVariables,
timeLoop, xOld // <-- new arguments
);
// assemble linear/non-linear problem as before
// ...File:
dumux-course/exercises/exercise-basic/2pmain.cc
The skeleton of a time loop:
File:
dumux-course/exercises/exercise-basic/2pmain.cc
Solving a time step:
// time loop
timeLoop->start(); do
{
// linearize & solve
nonLinearSolver.solve(x, *timeLoop);
// make the new solution the old solution
xOld = x;
gridVariables->advanceTimeStep();File:
dumux-course/exercises/exercise-basic/2pmain.cc
Advancing the time loop to the next step:
// advance to the time loop to the next step
timeLoop->advanceTimeStep();
// report statistics of this time step
timeLoop->reportTimeStep();
// set new dt as suggested by the newton solver
timeLoop->setTimeStepSize(
nonLinearSolver.suggestTimeStepSize(timeLoop->timeStepSize())
);
} while (!timeLoop->finished());
// print final report
timeLoop->finalize(leafGridView.comm());File:
dumux-course/exercises/exercise-basic/2pmain.cc
Build system (CMake)
Typical C++ build steps
- configure
- compile
- install (copy programs to some location)
Step 3 is usually skipped by DuMux developers. But you can of course “install” Dune modules and DuMux.
Build system - what is CMake?
- Open-source build system tool developed by KITware
- Offers a one-tool-solution to all building tasks, like configuring, building, linking, testing and packaging
- Is portable and supports cross-platform compilation
- Build file generator: Support various backends called generators (default: GNU Makefiles)
- Control files written in the CMake language
Build system - CMakeLists.txt
- Every directory in a project contains a file called
CMakeLists.txt, which is written in the CMake language - Upon configure, the top-level
CMakeLists.txtis executed - Subfolders are included with the
add_subdirectory(...)function
Build system - configuring
- Configure build-time compiler parameters / linking information
- Create “targets” that can be build to create executables
- Find and link external libraries / software dependencies
Build system - dunecontrol
- For Dune, CMake is triggered via the
dunecontrolscript
- useful commands:
configure: configure libraries, variables, paths, filesmake all: build librariesall: includesconfigureandmake all
Build system - dunecontrol
- For Dune, CMake is triggered via the
dunecontrolscript
- useful options:
--opts=<optionfile.opts>specify e.g. compiler flags; DuMux providesdumux/cmake.opts.--build-dir=<build directory>specify path for out-of-source build; Default: every module contains its own build directory calledbuild-cmake/--only <module>only apply command to a specific module/s (comma-separated list)
Build system - dunecontrol
You may have to reconfigure (rerun dunecontrol) whenever
a dependency changes or a Dune library is updated. CMake caches. To
reconfigure, you may need to remove the cache first:
removes the CMake cache files from all Dune modules.
(Use --only <module> to only remove caches of
specific modules.)
Build system - basic CMake functions
- Use
add_subdirectoryfor recursively adding subdirectories - Subdirectory must contain a
CMakeLists.txt(can be empty) - Executables are added via
add_executable(<name> source1 [source2 ...]) - Tests are added via
dumux_add_testwhich also add a test executable to the test suite - Symlinks can be added via
dune_symlink_to_source_files
Build system
CMakeLists.txt for an example application: create a test
target exercise_basic_2p by defining a name and source
file:
File:
dumux-course/exercises/exercise-basic/CMakeLists.txt
Build system
Another example: add extra compile definitions and commands (typical for DuMux regression tests):
dumux_add_test(
NAME test_2p_incompressible_box
SOURCES test_2p_fv.cc
COMPILE_DEFINITIONS TYPETAG=TwoPIncompressibleBox
COMMAND ${CMAKE_SOURCE_DIR}/bin/testing/runtest.py
CMD_ARGS --script fuzzy
--files ${CMAKE_SOURCE_DIR}/test/references/lensbox-reference.vtu
${CMAKE_CURRENT_BINARY_DIR}/2p_box-00007.vtu
--command "${CMAKE_CURRENT_BINARY_DIR}/test_2p_incompressible_box
test_2p.input -Problem.Name 2p_box"
)File:
dumux/test/porousmediumflow/2p/incompressible/CMakeLists.txt
Build system
Extra: Create linked parameter file in build-cmake
folder, separately add executable and set compile definitions for an
executable:
dune_symlink_to_source_files(FILES "params.input")
# or: add_input_file_links()
# using tpfa
add_executable(test_2p_incompressible_tpfa EXCLUDE_FROM_ALL main.cc)
target_compile_definitions(
test_2p_incompressible_tpfa PUBLIC TYPETAG=TwoPIncompressibleTpfa
)File:
dumux/test/porousmediumflow/2p/incompressible/CMakeLists.txt
Build system
Useful resources:
- CMake online documentation
- Dune CMake online documentation for CMake functions available with Dune.
Parallelism
Distributed memory parallelism with MPI
- MPI stands for Message Passing Interface
- MPI manages communication between processes that run in parallel
Distributed memory parallelism with MPI
- Main idea is the concept of domain decomposition
- The grid manages the grid partitioning
- Each local subdomain is assembled on an individual process (rank)
- Solvers have to handle decomposed vectors/matrices
- Most solvers in DuMux (iterative Krylov subspace methods based on dune-istl) are capable of MPI parallel solving
Distributed memory parallelism with MPI
Run with:
Distributed memory parallelism with MPI
Partitioned VTK output files:
- Each rank creates its own
*.vtu/*.vtpfile - Combined into
*.pvtu/*.pvtpfiles for each time step *.pvdgroups all*.pvtu/*.pvtpfiles into a time series
Shared-memory parallelism
- Dumux can exploit parallelism with the shared memory model
- Used in the
Dumux::FVAssemblerby default to assemble the residual and stiffness matrix - Is enabled when a multi-threading backend is found
- Backend is selected by
CMAKEduring configuration and stored inDUMUX_MULTITHREADING_BACKEND - Possible examples are
OpenMP,TBB, C++ parallel algorithms, andKokkos
Shared-memory parallelism
Restrict the number of threads
Number of threads can be restricted via the environment variable
DUMUX_NUM_THREADS
Shared-memory parallelism
Multi-threaded assembly
Control use of multi-threading during assembly in input file:
Defaults to true.
Shared-memory parallelism
Set multithreading backend to e.g. OpenMP in
dumux/cmake.opts before building the modules:
Other valid options are:
TBB,Cpp,Kokkos,Serial. If left
empty, it is automatically set by CMake. If no suitable backend is
found, CMake defaults to Serial.
Shared-memory parallelism
During dunecontrol, the chosen backend is displayed in
the output via
Exercises
Exercises
Basic application setup:
- Go to Exercise basic
The main function:
- Go to Exercise main file